
0x00 中断
根据手册,RP2040 的每一个核上有一个 NVIC(ARM nested vectored interrupt controller)。共有 32 个中断号(即 0 到 31),其中 0~25 是硬件中断。分配如下:
| IRQ | Interrupt Source | IRQ | Interrupt Source | IRQ | Interrupt Source |
|---|---|---|---|---|---|
| 1 | TIMER_IRQ_1 | 9 | PIO1_IRQ_0 | 17 | CLOCKS_IRQ |
| 2 | TIMER_IRQ_2 | 10 | PIO1_IRQ_1 | 18 | SPI0_IRQ |
| 3 | TIMER_IRQ_3 | 11 | DMA_IRQ_0 | 19 | SPI1_IRQ |
| 4 | PWM_IRQ_WRAP | 12 | DMA_IRQ_1 | 20 | UART0_IRQ |
| 5 | USBCTRL_IRQ | 13 | IO_IRQ_BANK0 | 21 | UART1_IRQ |
| 6 | XIP_IRQ | 14 | IO_IRQ_QSPI | 22 | ADC0_IRQ_FIFO |
| 7 | PIO0_IRQ_0 | 15 | SIO_IRQ_PROC0 | 23 | I2C0_IRQ |
| 8 | PIO0_IRQ_1 | 16 | SIO_IRQ_PROC1 | 24 | I2C1_IRQ |
| 25 | RTC_IRQ |
想要设置 handler,有几种办法:
- 调用
irq_set_exclusive_handler(),为某个 irq 设置 handler。 - 调用
irq_add_shared_handler(),为某个 irq 添加 handler。这是用于多路复用的中断。 - 在源码中定义特殊的函数(例如
void isr_dma_0),但文档称此方法不会获得性能收益,所以不推荐使用。
现在,我们来设置一个中断:由 GPIO 15 的上升沿和下降沿触发,在串口输出一点东西。代码如下:
#include <stdio.h>
#include <iostream>
#include <bitset>
#include "pico/stdlib.h"
#include "hardware/gpio.h"
void say_hello(uint gpio, uint32_t event) {
std::cout << time_us_64()
<< " IRQ: gpio "
<< gpio
<< " event "
<< std::bitset<32>(event)
<< std::endl;
}
int main() {
stdio_init_all();
const uint pin = 15;
gpio_init(pin);
gpio_set_dir(pin, GPIO_IN);
gpio_pull_up(pin);
printf("Start...\n");
gpio_set_irq_enabled_with_callback(
pin,
GPIO_IRQ_EDGE_RISE | GPIO_IRQ_EDGE_FALL,
true,
&say_hello);
while (1) {
tight_loop_contents();
}
}这里我们设置了 GPIO_IRQ_EDGE_RISE 和 GPIO_IRQ_EDGE_FALL 两个触发条件。按照文档,除了可以使用上述两种边缘触发之外,还可以使用电平触发。上面代码的尾部有一个 tight_loop_contents() 的死循环,这个写法在上一篇文章中也出现过。它的作用是让程序保持运行(而不是直接退出),从而 debugger 可以暂停程序。pico-examples 中的代码也经常使用这个技巧。
用杜邦线将 GPIO15 接地几次,观察输出:
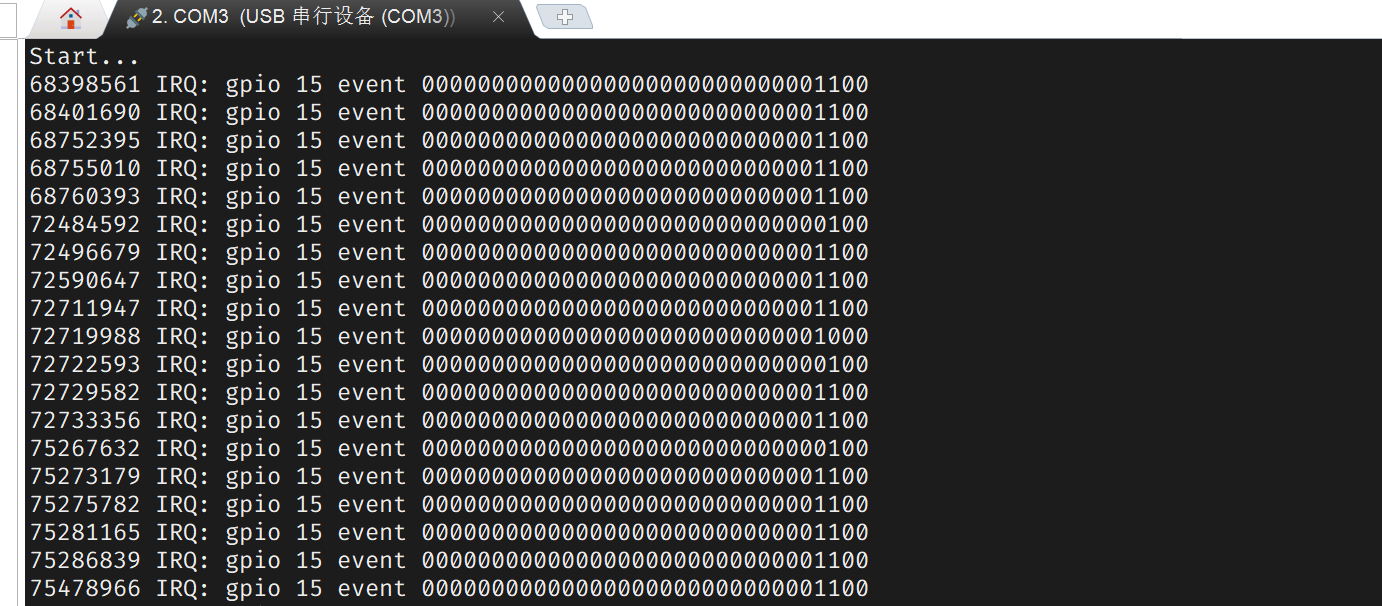
GPIO_IRQ_EDGE_FALL 的值是 4, GPIO_IRQ_EDGE_RISE 是 8。但从输出可以看到,有些 event 同时包含了这两个事件,说明在 handler 运行之前,gpio 经历了两次跳变。这些是毛刺。
我们的代码是使用高层次函数 gpio_set_irq_enabled_with_callback() 设置 handler,这显然并不在前文提到的三种设置 irq handler 的方法之中。现在来看看底层是如何实现的。跟进:
void gpio_set_irq_enabled_with_callback(uint gpio, uint32_t events, bool enabled, gpio_irq_callback_t callback) {
gpio_set_irq_enabled(gpio, events, enabled);
gpio_set_irq_callback(callback);
if (enabled) irq_set_enabled(IO_IRQ_BANK0, true);
}这三个函数的实现如下:
void gpio_set_irq_enabled(uint gpio, uint32_t events, bool enabled) {
// Separate mask/force/status per-core, so check which core called, and
// set the relevant IRQ controls.
io_irq_ctrl_hw_t *irq_ctrl_base = get_core_num() ?
&iobank0_hw->proc1_irq_ctrl : &iobank0_hw->proc0_irq_ctrl;
_gpio_set_irq_enabled(gpio, events, enabled, irq_ctrl_base);
}
void gpio_set_irq_callback(gpio_irq_callback_t callback) {
uint core = get_core_num();
if (callbacks[core]) {
if (!callback) {
irq_remove_handler(IO_IRQ_BANK0, gpio_default_irq_handler);
}
callbacks[core] = callback;
} else if (callback) {
callbacks[core] = callback;
irq_add_shared_handler(IO_IRQ_BANK0, gpio_default_irq_handler, GPIO_IRQ_CALLBACK_ORDER_PRIORITY);
}
}
void irq_set_enabled(uint num, bool enabled) {
check_irq_param(num);
irq_set_mask_enabled(1u << num, enabled);
}
简而言之:
gpio_set_irq_enabled(gpio, events, enabled)的作用是写IO_BANK0_PROC0_INTE0寄存器,设置对应的触发条件位,让 GPIO 视时机产生中断。gpio_set_irq_callback(callback)的作用是将修改callbacks数组,然后调用irq_add_shared_handler()以设置gpio_default_irq_handler这个 handler。注意callbacks数组并不是系统的中断向量表,它只是gpio.c中定义的静态变量。从代码中我们也可以发现,如果想要响应两个 GPIO 的上升沿,则各自编写 handler 函数并调用gpio_set_irq_callback()是不行的,callbacks数组会被覆盖。应当使用gpio_add_raw_irq_handler_masked()。irq_set_enabled(IO_IRQ_BANK0, true)的作用是启动 core 的中断处理。
user_irq_claim_unused() 获得一个空闲的 irq 编号,用 irq_set_pending() 触发中断。0x01 定时器
RP2040 有一个 64-bit timer 外设,每 us 递增一次。另外,提供了 4 个闹钟,闹钟在匹配上 timer 的低 32 bit 时,可以产生中断。
现在通过定时器,实现「1s 之后输出一句 hello」。代码如下:
#include "pico/stdlib.h"
#include <stdio.h>
int64_t say_hello(alarm_id_t id, void *user_data) {
printf("[%6lu] hello, world!\n", to_ms_since_boot(get_absolute_time()));
return 0;
}
int main() {
stdio_init_all();
add_alarm_in_ms(1000, say_hello, nullptr, false);
printf("[%6lu] sleep...\n", to_ms_since_boot(get_absolute_time()));
while(true) {
tight_loop_contents();
}
}
跟进 add_alarm_in_ms 函数看一眼:
static inline alarm_id_t add_alarm_in_ms(uint32_t ms, alarm_callback_t callback, void *user_data, bool fire_if_past) {
return alarm_pool_add_alarm_in_ms(alarm_pool_get_default(), ms, callback, user_data, fire_if_past);
}
static inline alarm_id_t alarm_pool_add_alarm_in_ms(alarm_pool_t *pool, uint32_t ms, alarm_callback_t callback, void *user_data, bool fire_if_past) {
return alarm_pool_add_alarm_at(pool, delayed_by_ms(get_absolute_time(), ms), callback, user_data, fire_if_past);
}
alarm_id_t alarm_pool_add_alarm_at(alarm_pool_t *pool, absolute_time_t time, alarm_callback_t callback,
void *user_data, bool fire_if_past) {
bool missed = false;
alarm_id_t public_id;
do {
uint8_t id_high = 0;
uint32_t save = spin_lock_blocking(pool->lock);
pheap_node_id_t id = add_alarm_under_lock(pool, time, callback, user_data, 0, false, &missed);
if (id) id_high = *get_entry_id_high(pool, id);
spin_unlock(pool->lock, save);
if (!id) {
// no space in pheap to allocate an alarm
return -1;
}
// note that if missed was true, then the id was never added to the pheap (because we
// passed false for create_if_past arg above)
public_id = missed ? 0 : make_public_id(id_high, id);
if (missed && fire_if_past) {
// ... so if fire_if_past == true we call the callback
int64_t repeat = callback(public_id, user_data);
// if not repeated we have no id to return so set public_id to 0,
// otherwise we need to repeat, but will assign a new id next time
// todo arguably this does mean that the id passed to the first callback may differ from subsequent calls
if (!repeat) {
public_id = 0;
break;
} else if (repeat < 0) {
time = delayed_by_us(time, (uint64_t)-repeat);
} else {
time = delayed_by_us(get_absolute_time(), (uint64_t)repeat);
}
} else {
// either:
// a) missed == false && public_id is > 0
// b) missed == true && fire_if_past == false && public_id = 0
// but we are done in either case
break;
}
} while (true);
return public_id;
}
static pheap_node_id_t add_alarm_under_lock(alarm_pool_t *pool, absolute_time_t time, alarm_callback_t callback,
void *user_data, pheap_node_id_t reuse_id, bool create_if_past, bool *missed) {
pheap_node_id_t id;
if (reuse_id) {
assert(!ph_contains_node(pool->heap, reuse_id));
id = reuse_id;
} else {
id = ph_new_node(pool->heap);
}
if (id) {
alarm_pool_entry_t *entry = get_entry(pool, id);
entry->target = time;
entry->callback = callback;
entry->user_data = user_data;
if (id == ph_insert_node(pool->heap, id)) {
bool is_missed = hardware_alarm_set_target(pool->hardware_alarm_num, time);
if (is_missed && !create_if_past) {
ph_remove_and_free_node(pool->heap, id);
}
if (missed) *missed = is_missed;
}
}
return id;
}可见,当我们调用 add_alarm_in_ms 时,实际上发生了以下的事:
- 将当前时间加上延时时间,作为闹钟设定
- 从 pool 中找一个可用的 alarm(通过自旋锁做到并发安全)
- 若
fire_if_past=true且现在已经比计划要执行的时间还晚了,则立即执行一遍 callback
若要实现「每秒说一句 hello」,只需更改 say_hello 的返回值。代码如下:
int64_t say_hello(alarm_id_t id, void *user_data) {
printf("[%6lu] hello, world!\n", to_ms_since_boot(get_absolute_time()));
return 1000 * 1000;
}
查阅 alarm_callback_t 类型的文档可知:
- 若返回 0,则不重新安排闹钟
- 若返回正数,则在函数执行完成之后 $k$ us 再次触发函数
- 若返回负数,则在上次触发之后 $k$ us 再次触发函数
pico sdk 还提供了另一种方式来安排重复任务。代码如下:
#include "pico/stdlib.h"
#include <stdio.h>
bool say_hello(repeating_timer_t *rt) {
printf("[%6lu] hello, world!\n", to_ms_since_boot(get_absolute_time()));
return true;
}
int main() {
stdio_init_all();
repeating_timer_t rt;
add_repeating_timer_ms(1000, say_hello, nullptr, &rt);
printf("[%6lu] sleep...\n", to_ms_since_boot(get_absolute_time()));
while(true) {
tight_loop_contents();
}
}add_repeating_timer_ms 这个 API 只要求 callback 函数返回 bool 值,true 表示下一次要继续执行,否则停止执行。
我们观察一下定时任务对程序控制流的影响。先让 main 函数定一个 10ms 执行一次的任务,然后 main 函数开始连续翻转 GPIO 6:
#include "pico/stdlib.h"
#include <stdio.h>
bool say_hello(repeating_timer_t *rt) {
printf("[%6lu] hello, world!\n", to_ms_since_boot(get_absolute_time()));
return true;
}
int main() {
stdio_init_all();
repeating_timer_t rt;
add_repeating_timer_ms(10, say_hello, nullptr, &rt);
printf("[%6lu] sleep...\n", to_ms_since_boot(get_absolute_time()));
gpio_init(6);
gpio_set_dir(6, GPIO_OUT);
while(true) {
gpio_put(6, true);
gpio_put(6, false);
}
}
可见,在处理 alarm 中断期间,cpu core 会离开原有的任务。这也是很多协议难以 bit banging(指用 cpu 操作 GPIO 以满足时序)的原因之一。
0x02 DMA 初级使用
DMA 是数据的搬运工。它可以将数据从某一片地址搬运到另一片地址,而不占用 cpu 时间。在每个时钟周期内,DMA 可以进行 32 bit 的读取和写入,通常有三种用法:内存到内存、内存到外设、外设到内存。
我们先利用 DMA 实现 memcpy 的功能。代码如下:
#include "pico/stdlib.h"
#include <cstdlib>
#include <cstdio>
#include "hardware/dma.h"
int main() {
stdio_init_all();
const char src[] = "Hello, world";
printf("%p: %s\n", src, src);
char *dst = static_cast<char *>(malloc(100));
int chan = dma_claim_unused_channel(true);
dma_channel_config c = dma_channel_get_default_config(chan);
channel_config_set_transfer_data_size(&c, DMA_SIZE_8);
channel_config_set_read_increment(&c, true);
channel_config_set_write_increment(&c, true);
dma_channel_configure(
chan,
&c,
dst,
src,
sizeof(src),
true
);
dma_channel_wait_for_finish_blocking(chan);
printf("%p: %s\n", dst, dst);
while(true) {
tight_loop_contents();
}
}

上述代码指定了每次传输 8 字节、传输后 src 地址自增、dst 地址自增、传输 sizeof(src) 次。
接下来,考虑利用 DMA 把数据运送到 uart 的 tx fifo。配置为 src 自增、dst 不变,代码如下:
#include "pico/stdlib.h"
#include <cstdlib>
#include <cstdio>
#include "hardware/dma.h"
#include "hardware/uart.h"
int main() {
uart_init(uart0, 115200);
gpio_set_function(0, GPIO_FUNC_UART);
gpio_set_function(1, GPIO_FUNC_UART);
uart_puts(uart0, "\r\n\r\nDMA begin:");
int chan = dma_claim_unused_channel(true);
dma_channel_config c = dma_channel_get_default_config(chan);
channel_config_set_transfer_data_size(&c, DMA_SIZE_8);
channel_config_set_read_increment(&c, true);
channel_config_set_write_increment(&c, false);
const static char src[] = "0123456789" "0123456789" "0123456789" "0123456789" "0123456789" "0123456789" "0123456789" "0123456789" "0123456789" "0123456789";
dma_channel_configure(
chan,
&c,
&uart0_hw->dr,
src,
sizeof(src),
true
);
dma_channel_wait_for_finish_blocking(chan);
while(true) {
tight_loop_contents();
}
}
为何发送的数据少于预期呢?我们注意到,uart 是低速设备,波特率仅为 115200,跟不上 DMA 的速度。但 DMA 会持续向 tx 寄存器写入,队列被塞满之后,新来的数据会被忽略。要解决此问题,我们需要限制 DMA 的传输速率。
事实上,可以通过 DREQ 信号控制 DMA 的传输,例如,采用 timer 来提供 DREQ 信号。代码如下:
int timer = dma_claim_unused_timer(true);
dma_timer_set_fraction(timer, 1, UINT16_MAX);
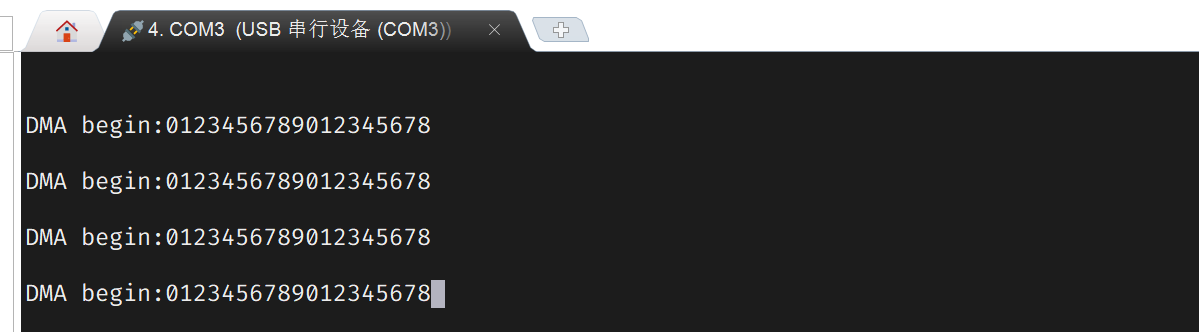
channel_config_set_dreq(&c, dma_get_timer_dreq(timer));在代码中,我们将系统时钟进行 1/65535分频,由于 RP2040 默认系统频率是 125MHz,可以计算出分频后的时钟为 1907.378 Hz,即每 524.3 us 传输一次。实验结果如下:

这次数据被正确传输了。逻辑分析仪结果如下:

测量出的每次传输间隔为 524.596us,与计算结果十分一致。不过,采用时钟来强行控制每秒传输次数并不是最佳方案:因为我们可以直接使用 DREQ_UART0_TX。
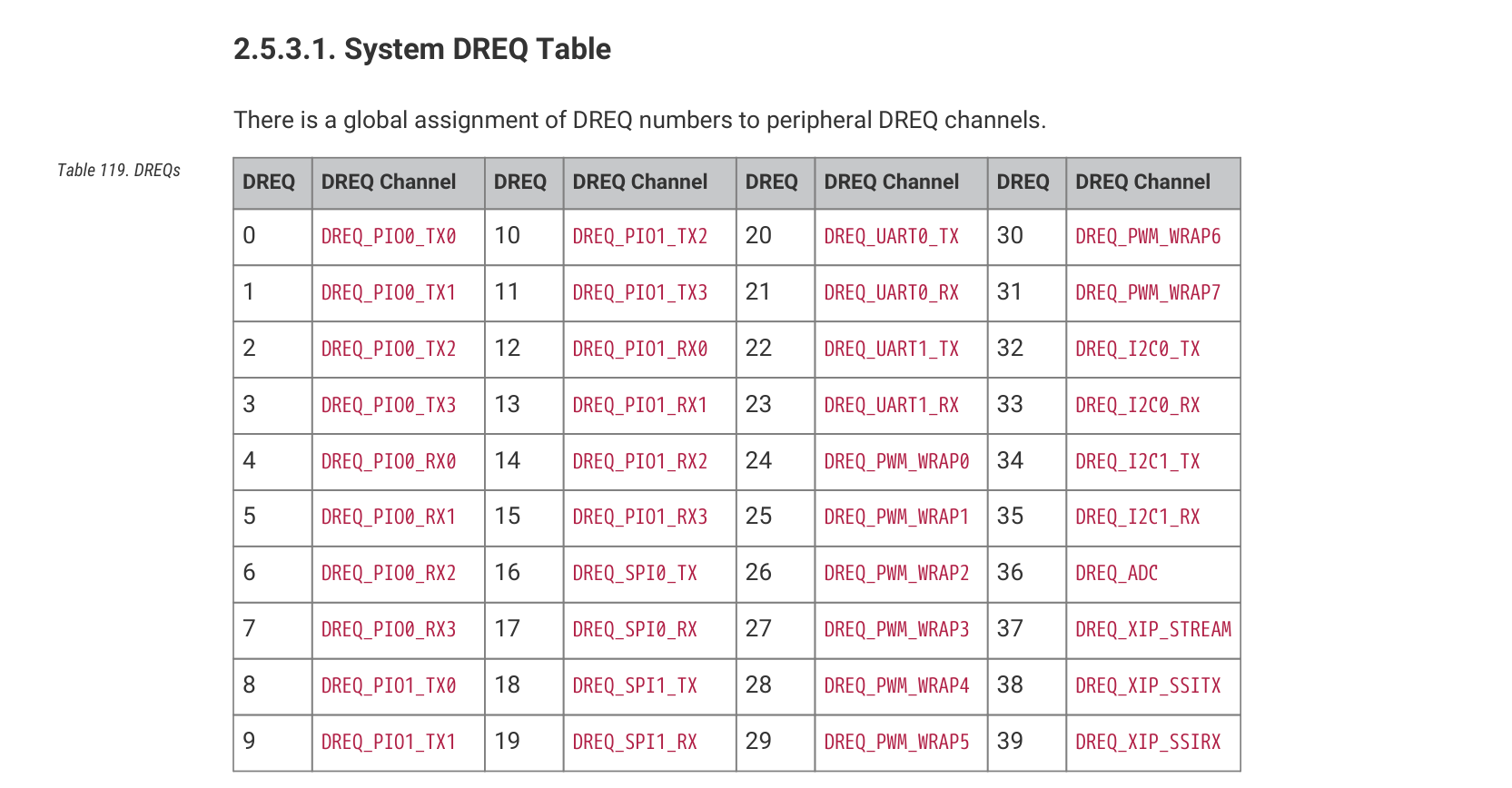
这样,我们只需要一行代码,即可使 DMA 适配串口的发送速率:
channel_config_set_dreq(&c, DREQ_UART0_TX);0x03 利用 DMA 实现串口回环
在测试 CH340 等 usb 转 uart 芯片时,我们会把 rx 和 tx 短接起来,看看能不能收到自己发出的信息。现在我们利用 DMA,来把 rx 收到的信息原样返回。在此场景下,DMA 的 src 和 dst 都是外设寄存器。代码如下:
#include "pico/stdlib.h"
#include <cstdio>
#include "hardware/dma.h"
#include "hardware/uart.h"
int main() {
uart_init(uart0, 115200);
gpio_set_function(0, GPIO_FUNC_UART);
gpio_set_function(1, GPIO_FUNC_UART);
uart_puts(uart0, "\r\n\r\nDMA begin:");
int chan = dma_claim_unused_channel(true);
dma_channel_config c = dma_channel_get_default_config(chan);
channel_config_set_transfer_data_size(&c, DMA_SIZE_8);
channel_config_set_read_increment(&c, false);
channel_config_set_write_increment(&c, false);
channel_config_set_dreq(&c, DREQ_UART0_RX);
dma_channel_configure(
chan,
&c,
&uart0_hw->dr,
&uart0_hw->dr,
UINT32_MAX,
true
);
while(true) {
tight_loop_contents();
}
}
敲击键盘时,debug probe 的 tx 灯(黄色)与 rx 灯(绿色)同时闪烁,说明确实发回了数据。
0x04 访存效率讨论
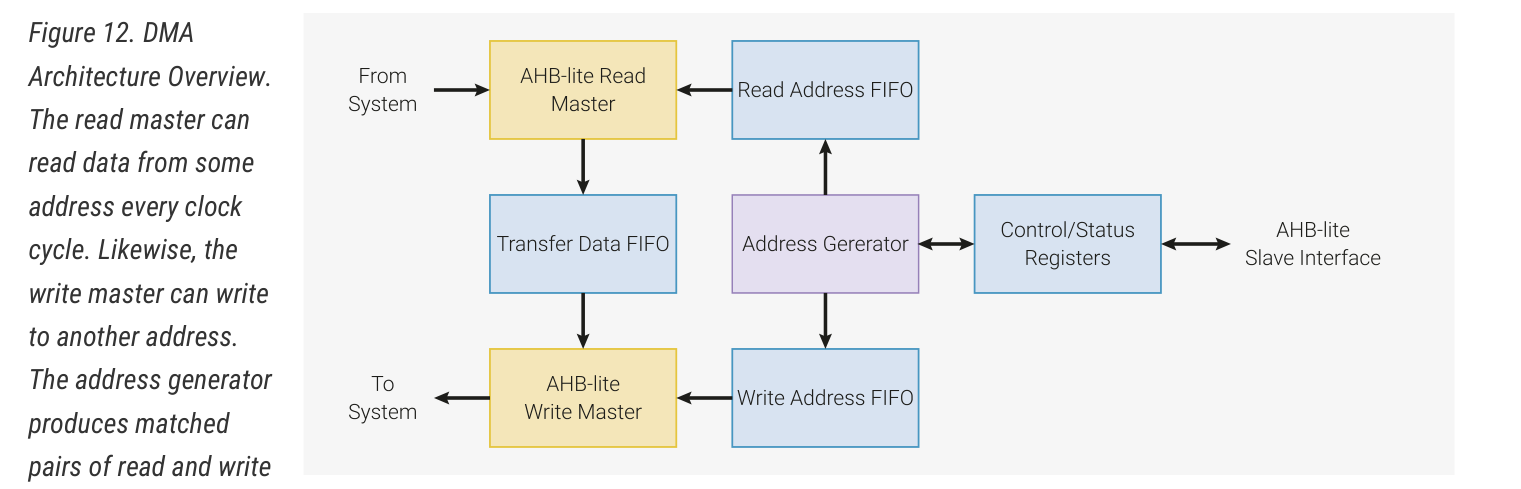
我们应当更详细地讨论 DMA 传输数据的效率。回顾 bus fabric:
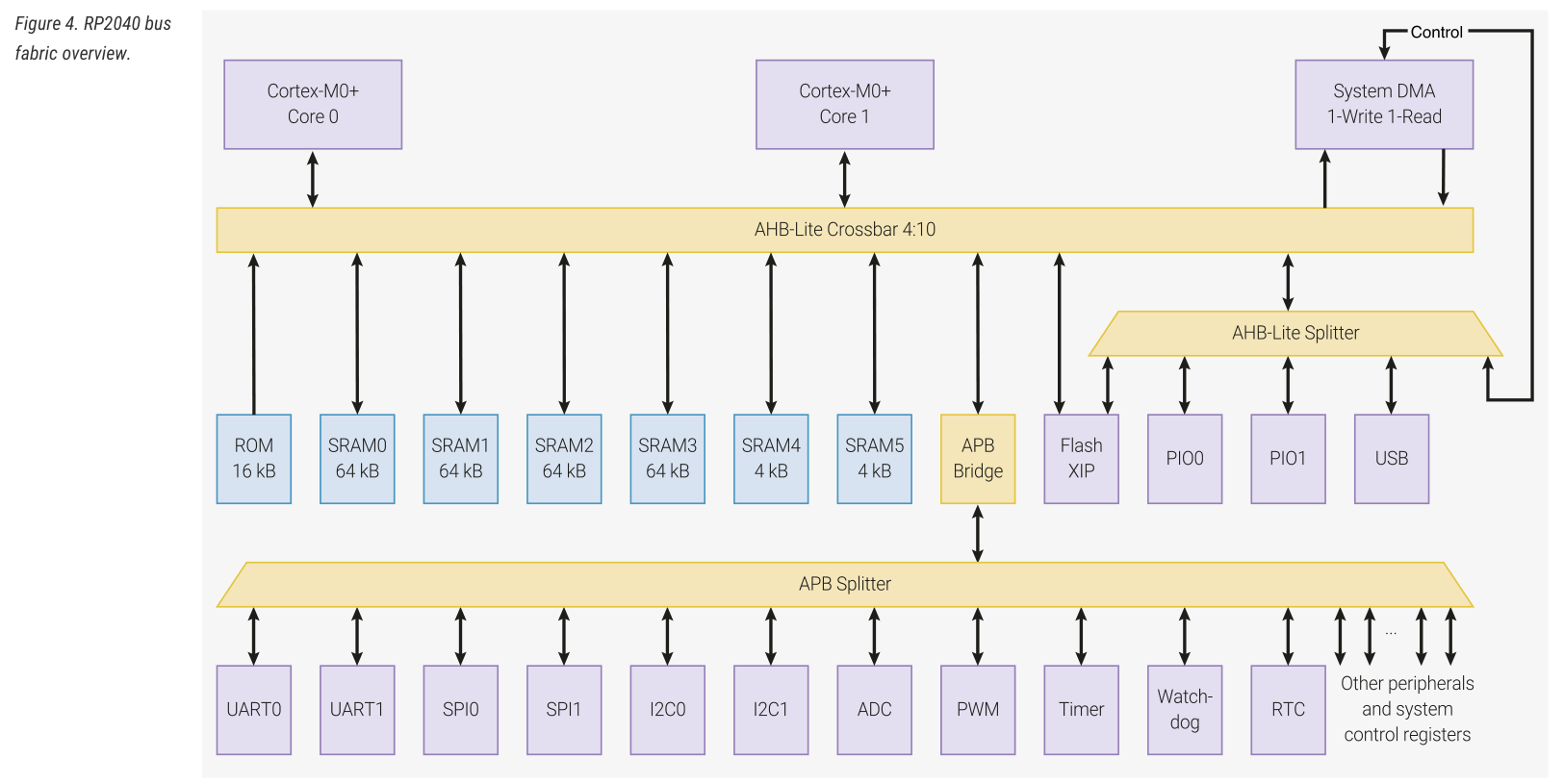
按照手册,四个 AHB-Lite master 可以同时访问四个不同的下游设备。如果多个 master 试图同时访问某个下游设备,那么裁判规则如下:首先,高优先级的 master 拥有访问权;若仍无法裁决,则在其中进行 round robin。默认情况下,四个 master 的优先级均为 0。
上一篇文章提到,为了提升并行能力,RP2040 的主内存空间是由四个 SRAM bank 交错提供的。从 0x20000000 开始的地址空间,会被以 4 byte 为单位轮流映射到这 4 个 bank 中。那么,我们可以想象这样几个场景:
- 线性地拷贝内存,例如
memcpy。如果每次传输时,src 都不幸地与 dst 在同一个 bank,则每个时钟周期要么读取,要么写入。这会使得吞吐率降低到 50%。 - cpu 在不停地读取内存,同时 DMA 在将一大片字符串送到某个寄存器。那么,cpu 访存时,有 25% 的概率撞上 DMA 正在使用的内存;cpu 在 round robin 中胜出的概率为 50%。这会导致 cpu 访存时有 12.5% 的概率需要等待一个时钟周期。
现在来进行线性拷贝实验。思路很简单:建立两个 uint32 数组,然后将 A 数组拷贝到 B 数组从 0、1、2、3 开始的位置上。这四次拷贝中,一定有一次拷贝是 src、dst 永远位于相同 SRAM bank 的。
一个最朴素的实现如下:启动 DMA,然后调用 dma_channel_wait_for_finish_blocking 等待 DMA 完成,多次重复实验取平均值。然而,在这个过程中,cpu 会进入 busy wait,去轮询 DMA 的寄存器,这对性能可能有影响(实际测试结果,一般情况的 2 KB 拷贝耗费 8.083 us,恶劣情况是 10.483 us)。我们最好让 cpu 呆在原地执行 nop 性质的指令。
DMA 可以配置 irq,在数据传输完成后会发起中断,我们可以利用这个特性来计时。做法如下:
- cpu core 将
start_time设为当前时间,然后启动 DMA,自己进入睡眠; - DMA 结束后触发中断,中断处理程序将
end_time设为当前时间; - cpu 从睡眠中唤醒,读取
end_time,计算实验结果。
然而,这个实现也存在问题。我们现在唯一的计时手段是 get_absolute_time(),它的精度是 us,但我们完成几 KB 拷贝,时间也是 us 级别的。这会造成相当严重的测量误差。因此,我们需要在中断程序中启动新一轮 DMA,完成 n 轮传输之后,最后报告结果。代码如下:
#include "pico/stdlib.h"
#include <cstdio>
#include "hardware/dma.h"
const uint num_bytes = 32 * 1024;
static uint32_t data_src[num_bytes / 4 + 16];
static uint32_t buffer[num_bytes / 4 + 16];
static uint64_t start_time, end_time;
static uint chan;
void dma_irq_handler(void);
void init_dma() {
chan = dma_claim_unused_channel(true);
dma_channel_config c = dma_channel_get_default_config(chan);
channel_config_set_transfer_data_size(&c, DMA_SIZE_32);
channel_config_set_read_increment(&c, true);
channel_config_set_write_increment(&c, true);
dma_channel_configure(
chan,
&c,
nullptr,
nullptr,
num_bytes / 4,
false
);
dma_channel_set_irq0_enabled(chan, true);
irq_set_exclusive_handler(DMA_IRQ_0, dma_irq_handler);
irq_set_enabled(DMA_IRQ_0, true);
}
void* data_dst;
void start_dma() {
dma_channel_set_read_addr(chan, data_src, false);
dma_channel_set_write_addr(chan, data_dst, false);
dma_channel_start(chan);
}
static uint finished_epoch;
static const uint epoch_num = 1000;
// DMA 执行完成后触发
void dma_irq_handler() {
finished_epoch++;
if(finished_epoch != epoch_num) {
start_dma();
} else {
end_time = to_us_since_boot(get_absolute_time());
}
dma_channel_acknowledge_irq0(chan);
}
float transfer_benchmark(void *dst) {
start_time = to_us_since_boot(get_absolute_time());
end_time = start_time;
finished_epoch = 0;
data_dst = dst;
start_dma();
sleep_ms(200);
uint64_t total_us = end_time - start_time;
printf("total_us = %llu\n", total_us);
return (float)total_us / epoch_num;
}
int main() {
stdio_init_all();
puts("\n\nbegin test:");
init_dma();
for(int offset=0; offset<8; offset++) {
float cost = transfer_benchmark(buffer + offset);
printf("offset=%d: avg %f us / %d bytes copy from %p to %p\n", offset, cost, num_bytes, data_src, data_dst);
}
puts("done.");
while(true) {
tight_loop_contents();
}
}
先来进行理论计算。一般情况下,每个时钟周期内,DMA 可以传输 4 字节的数据,因此传输 32768 个字节,需要 8192 个时钟周期。而一个时钟周期为 8ns,因此理论耗时为 65.536 us。特殊情况下,耗时翻倍,应当为 131.072 us。
然而,实验结果如下:
begin test:
total_us = 66082
offset=0: avg 66.082001 us / 32768 bytes copy from 2000847C to 2000043C
total_us = 66057
offset=1: avg 66.056999 us / 32768 bytes copy from 2000847C to 20000440
total_us = 98816
offset=2: avg 98.816002 us / 32768 bytes copy from 2000847C to 20000444
total_us = 66065
offset=3: avg 66.065002 us / 32768 bytes copy from 2000847C to 20000448
total_us = 66049
offset=4: avg 66.049004 us / 32768 bytes copy from 2000847C to 2000044C
total_us = 66057
offset=5: avg 66.056999 us / 32768 bytes copy from 2000847C to 20000450
total_us = 98816
offset=6: avg 98.816002 us / 32768 bytes copy from 2000847C to 20000454
total_us = 66065
offset=7: avg 66.065002 us / 32768 bytes copy from 2000847C to 20000458
done.
正常情况的吞吐率接近理论计算结果,但恶劣情况下的耗时仅为正常耗时的 1.5 倍而非 2 倍,与预期不符。而如果我们不是线性拷贝,而是从单个地址拷贝到单个地址(即把 read_increment, write_increment 设为 false),则结果如下:
begin test:
total_us = 131614
offset=0: avg 131.613998 us / 32768 bytes copy from 2000847C to 2000043C
total_us = 66081
offset=1: avg 66.081001 us / 32768 bytes copy from 2000847C to 20000440
total_us = 66081
offset=2: avg 66.081001 us / 32768 bytes copy from 2000847C to 20000444
total_us = 66081
offset=3: avg 66.081001 us / 32768 bytes copy from 2000847C to 20000448
total_us = 131601
offset=4: avg 131.600998 us / 32768 bytes copy from 2000847C to 2000044C
total_us = 66081
offset=5: avg 66.081001 us / 32768 bytes copy from 2000847C to 20000450
total_us = 66081
offset=6: avg 66.081001 us / 32768 bytes copy from 2000847C to 20000454
total_us = 66081
offset=7: avg 66.081001 us / 32768 bytes copy from 2000847C to 20000458
done.异常情况耗时为正常情况的 2 倍,与理论计算结果相符。也就是说,我们现在面临这样的情况:「读写 bank 1、读写 bank 2、读写 bank3、读写 bank4」与连续读写同一个 bank,有巨大的性能差异(前者耗时为 1.5x 正常耗时,后者为 2x)。这该如何解释呢?
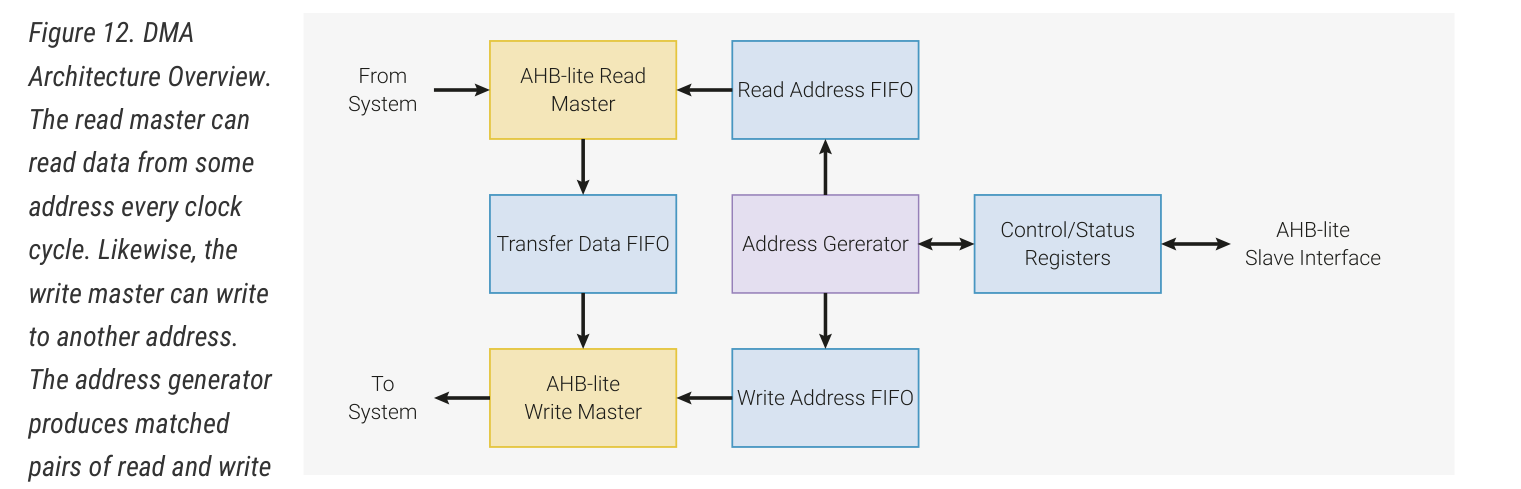
观察 DMA 的结构,它内部有读取地址队列、写入地址队列、数据队列,读写是分离的。也就是说,bank 2 的读取不一定要等到 bank 1 写入完成之后才能执行,而是在读完 bank 1 之后就可以执行;读取 bank 2 的时钟周期内,可能同时正在写入 bank 1。既然读取与写入并不耦合,那么拷贝耗时不到 2x 也是可以理解的了。而对于连续读写同一个 bank 的情况,由于该 bank 在一个时钟周期内只能读取或写入一次,因此耗时为理想情况的 2 倍。