
「识别手写数字」是一个经典的机器学习任务,有著名的 MNIST 数据集。我们曾经利用多层感知机实现了 90+% 的准确率,本文将介绍卷积神经网络 LeNet,主要参考 这篇英文博客 的讲解。
LeNet 是几种神经网络的统称,它们是 Yann LeCun 等人在 1990 年代开发的。一般认为,它们是最早的卷积神经网络(Convolutional Neural Networks, CNNs)。模型接收灰度图像,并输出其中包含的手写数字。LeNet 包含了以下三个模型:
- LeNet-1:5 层模型,一个简单的 CNN。
- LeNet-4:6 层模型,是 LeNet-1 的改进版本。
- LeNet-5:7 层模型,最著名的版本。
CNN 的设计是为了模拟人眼的感知方式。传统的 CNN 一般包含以下三种层:
- 卷积层(convolution layers)
- 降采样层(subsampling layers),或称池化层(pooling layers)
- 全连接层(fully connected layers)
它们有各自的用途,通过排列这些层,我们能实现各种 CNN。接下来,我们分别介绍这三种部件。
卷积层
卷积层利用卷积核(kernel,或称 filter)对图像进行卷积运算。每个 kernel 都是可训练的,有些 kernel 还有 bias 参数。执行卷积运算时,把 kernel 在原图上移动,步长为指定的参数 stride,有时还会做 padding。对于原图内容,将其与 kernel 先进行元素乘法,把结果求和,再加上 bias,就得到输出。
把原图跑完一遍之后,我们在各个位置的卷积结果,生成了特征图(feature map)。显然,kernel 越大,步长越长,padding 越小,则特征图越小。具体而言,满足:$$\text{output size} =\frac{\text{input size} - \text{kernel size} + 2\times \text{padding}}{\text{stride}} + 1$$
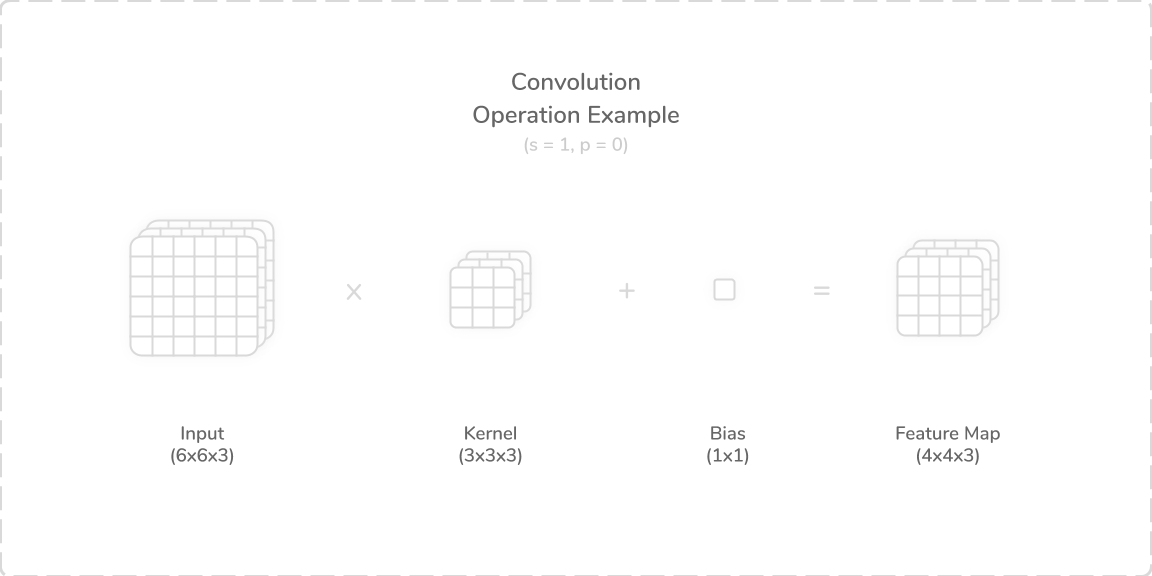
上图展示了一个典型的二维卷积。原图是 3 通道的,不填充,步长为 0。最终将生成 4×4 的 3 通道特征图。
池化层
池化层一般是不用训练的。它的目的是对特征进行降取样,显著减少特征的个数来方便学习。一般有两种池化方式:均值池化(average pooling)和最大池化(max pooling)。前者计算出一个区域的均值,后者从区域中取最大值。
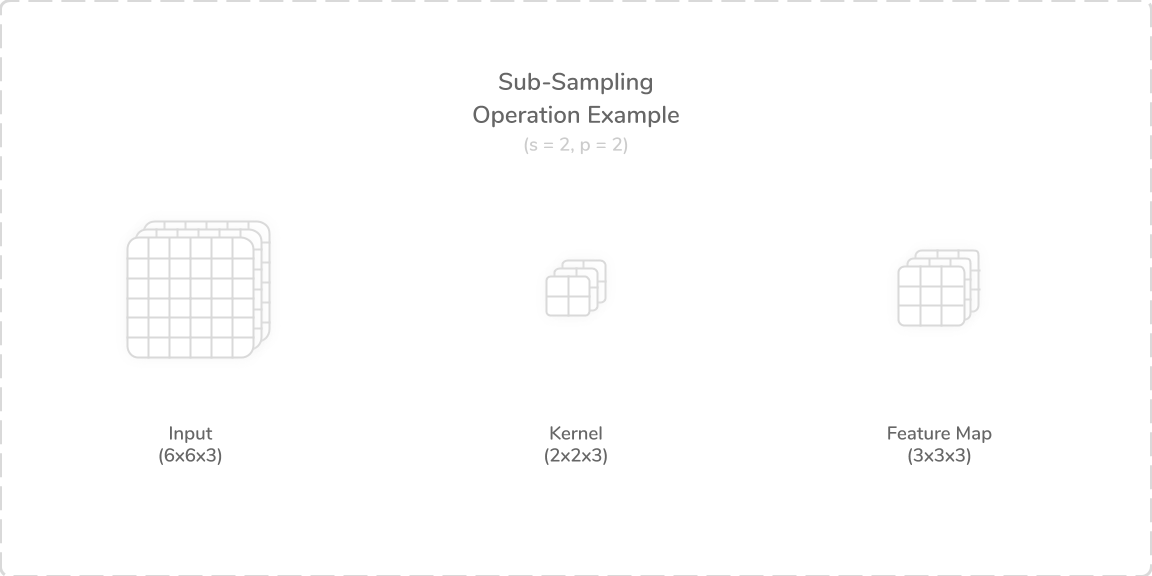
上图展示了一个不填充、步长为 2 的池化。6×6×3 的原图在池化之后,变成了 3×3×3 的大小。
全连接层
全连接层一般用于 CNN 的最后几层,负责提取卷积和池化之后的特征。这里不过多介绍。接下来,我们开始讨论几种 LeNet。
LeNet-1
LeNet-1 仅有五个层,结构如下:
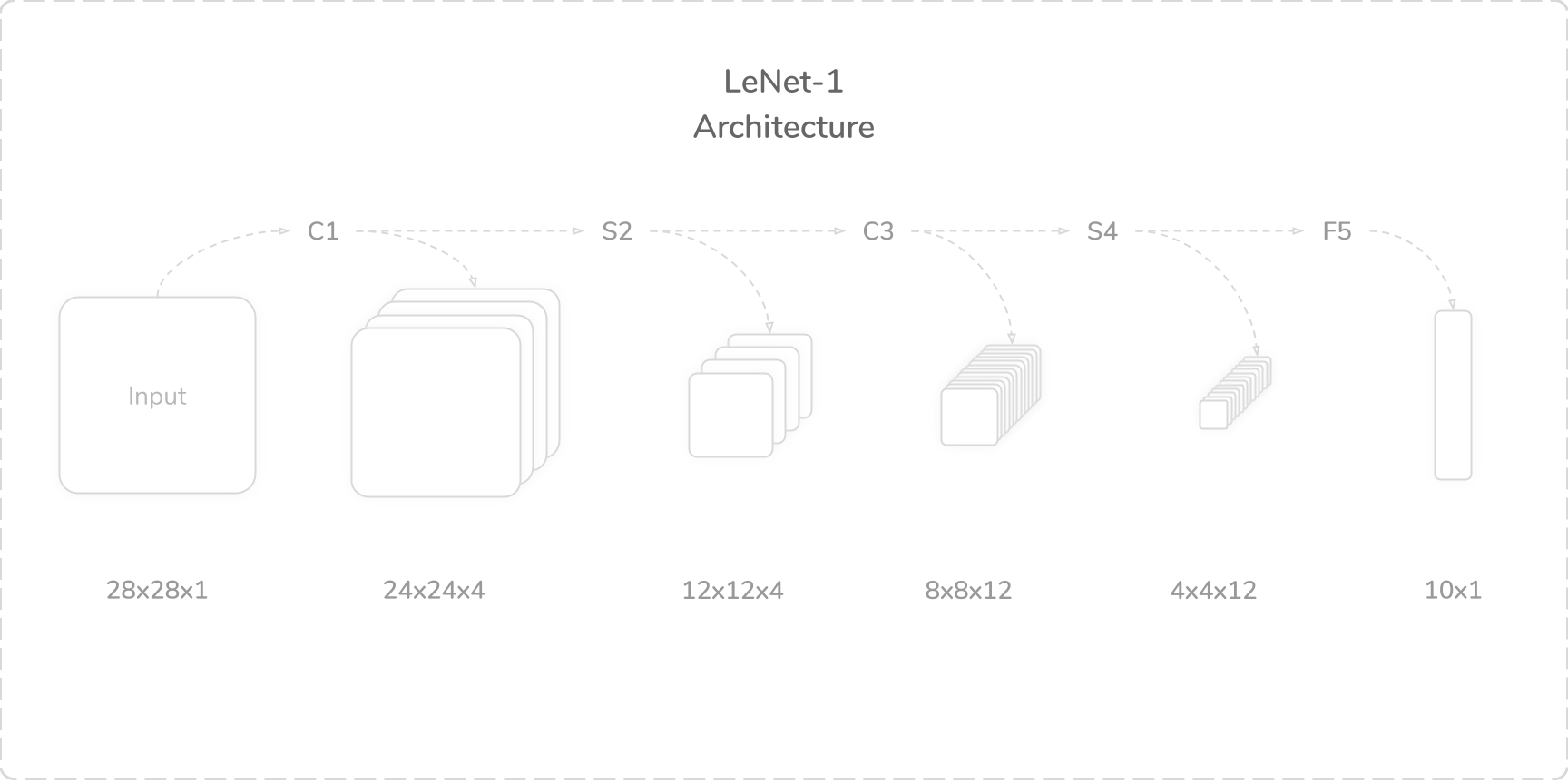
原先的 28×28 的灰度图像,先经过一个卷积层,生成 4 通道的 feature map;再进行池化降维,然后通过卷积层,得到 12 通道的 feature map。再次池化之后,用全连接层提取特征。具体参数如下:
- C1:卷积层,num_kernels=4, kernel_size=5×5, padding=0, stride=1
- S2:均值池化层,kernel_size=2×2, padding=0, stride=2
- C3:卷积层,num_kernels=12, kernel_size=5×5, padding=0, stride=1
- S4:均值池化层,kernel_size=2×2, padding=0, stride=2
- F5:全连接层,out_features=10
我们需要解释一下 C3 如何用 12 个 kernel,从 4 通道的图中提取出 12 个通道的特征。C3 的每个输出层,是与指定的一些 S2 层相连的,对应的 kernel 长宽是 5×5×n,其中 n 是它所连接的 S2 层数。连接分组方式是超参数(当然我们经常懒得去搞这件事,往往令每个输出层与所有输入层相连,下面的代码也是这样处理的)。
import torch
import torchvision
import torch.nn as nn
import torchvision.transforms as transforms
import torch.nn.functional as F
import numpy as np
import matplotlib.pyplot as plt
trans_to_tensor = transforms.Compose([
transforms.ToTensor()
])
data_train = torchvision.datasets.MNIST(
'./data',
train=True,
transform=trans_to_tensor,
download=True)
data_test = torchvision.datasets.MNIST(
'./data',
train=False,
transform=trans_to_tensor,
download=True)
data_train, data_test
'''
(Dataset MNIST
Number of datapoints: 60000
Root location: ./data
Split: Train
StandardTransform
Transform: Compose(
ToTensor()
),
Dataset MNIST
Number of datapoints: 10000
Root location: ./data
Split: Test
StandardTransform
Transform: Compose(
ToTensor()
))
'''我们随便展示一个数据:
train_loader = torch.utils.data.DataLoader(data_train, batch_size=100, shuffle=True)
x, y = next(iter(train_loader))
plt.imshow(x[0].squeeze(0), cmap='gray'), y[0]
训练网络:
def test(net):
net.eval()
test_loader = torch.utils.data.DataLoader(data_train, batch_size=10000, shuffle=False)
test_data = next(iter(test_loader))
with torch.no_grad():
x, y = test_data[0], test_data[1]
outputs = net(x)
pred = torch.max(outputs, 1)[1]
print(f'test acc: {sum(pred == y) / outputs.shape[0]}')
net.train()
def fit(net, epoch=1):
net.train()
run_loss = 0
for num_epoch in range(epoch):
print(f'epoch {num_epoch}')
for i, data in enumerate(train_loader):
x, y = data[0], data[1]
outputs = net(x)
loss = criterion(outputs, y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
run_loss += loss.item()
if i % 100 == 99:
print(f'[{(i+1) * 100} / 60000] loss={run_loss / 100}')
run_loss = 0
test(net)上面是训练 MNIST 的通用框架。接下来我们实现 LeNet-1:
class LeNet1(nn.Module):
def __init__(self):
super().__init__()
self.conv1 = nn.Conv2d(1, 4, [5, 5])
self.pool1 = nn.AvgPool2d([2, 2])
self.conv2 = nn.Conv2d(4, 12, [5, 5])
self.pool2 = nn.AvgPool2d([2, 2])
self.fc1 = nn.Linear(12 * 4 * 4, 10)
def forward(self, x):
x = torch.tanh(self.conv1(x))
x = self.pool1(x)
x = torch.tanh(self.conv2(x))
x = self.pool2(x)
x = x.view(-1, 12 * 4 * 4)
x = self.fc1(x)
return x
net_1 = LeNet1()
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(net_1.parameters())
fit(net_1, epoch=5)
'''
epoch 0
[10000 / 60000] loss=1.3996468645334244
test acc: 0.8370000123977661
[20000 / 60000] loss=0.525577874481678
test acc: 0.8773999810218811
[30000 / 60000] loss=0.40644764140248296
test acc: 0.8932999968528748
[40000 / 60000] loss=0.367893455773592
test acc: 0.9024999737739563
[50000 / 60000] loss=0.3431669014692307
test acc: 0.9133999943733215
[60000 / 60000] loss=0.30854775562882425
test acc: 0.916100025177002
....
epoch 4
[10000 / 60000] loss=0.1185341552272439
test acc: 0.9692000150680542
[20000 / 60000] loss=0.10541347645223141
test acc: 0.968999981880188
[30000 / 60000] loss=0.107633958440274
test acc: 0.9714000225067139
[40000 / 60000] loss=0.10533566184341908
test acc: 0.9721999764442444
[50000 / 60000] loss=0.10117398623377084
test acc: 0.9725000262260437
[60000 / 60000] loss=0.09958926556631922
test acc: 0.9736999869346619
'''可见 LeNet-1 的准确度还是很高的,训练 20 个 epoch 之后可以达到 98.90% 的准确率。另外,我没有调超参数,调一调之后还可以涨更多的点,Github 上有 网友的代码 的 batchsize 是 64,拿了99.30% 准确率。从 Adam 换成 SGD 也许可以再涨一些点。
接下来要问:卷积起到了什么作用?我们知道,卷积可以完成很多操作,例如高斯模糊、边缘提取等,这是因为卷积是对原图中一块相邻区域的运算。传统的多层感知机,对像素位置之间的关联是很弱的,而卷积层输出的 feature map 中,每个值都是由原图中的一个块产生,故考虑了相邻像素之间的关系。
下面展示两张图片经过 conv1 层之后的结果:
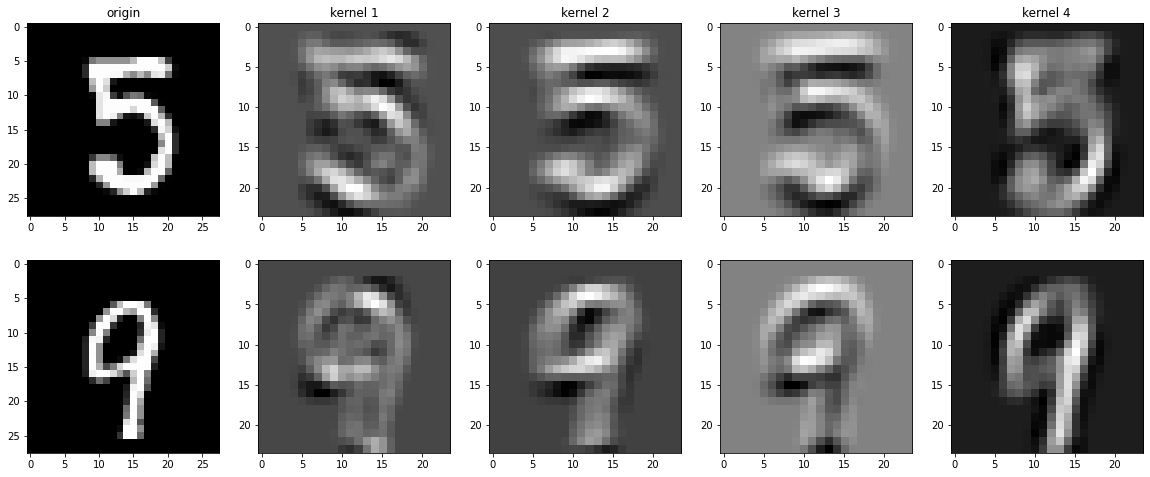
可以发现,第一个 kernel 可以很好地提取「左上-右下」的线条;第二、三个 kernel 可以提取横向的线条;第四个 kernel 可以提取「左下-右上」的线条。这不是我们钦定的,而是它们自己学习出来的。我们从中可以体会到 CNN 提取图片「部件」的独到之处。
LeNet-4
LeNet-4 是 LeNet-1 的改进版本,有 6 个层。它们主要的不同之处在于,LeNet-4 采用了两个全连接层来提取特征。另外,LeNet-4 的输入是 32×32 的灰度图。
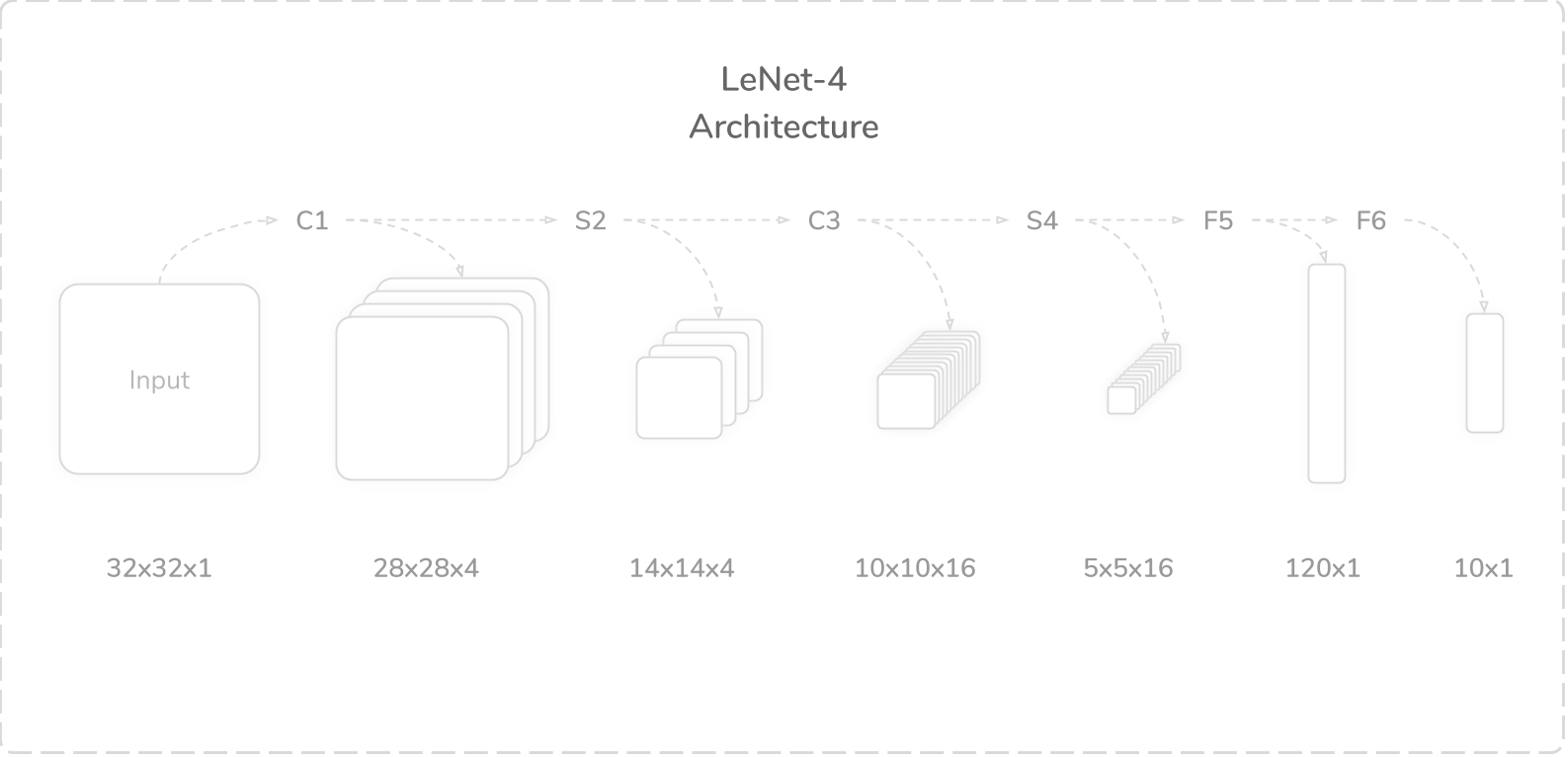
每个层的参数如下:
- C1:卷积层,num_kernels=4, kernel_size=5×5, padding=0, stride=1
- S2:均值池化层,kernel_size=2×2, padding=0, stride=2
- C3:卷积层,num_kernels=16, kernel_size=5×5, padding=0, stride=1
- S4:均值池化层,kernel_size=2×2, padding=0, stride=2
- F5:全连接层,out_features=120
- F6:全连接层,out_features=10
Yann LeCun 在 USPS 数据集上,测得 LeNet-1 的误判率是 1.7%,有 3246 个参数;LeNet-4 在 MNIST 上的误判率是 1.1%,但有 51050 个参数。像这种架构的 CNN,全连接层占了绝大部分的参数。
LeNet-5
LeNet-5 是 LeNet-4 的改进版,即现在我们熟知的那个 LeNet。它的层数达到了 7 层,获取 32×32 的输入,有 60850 个参数。
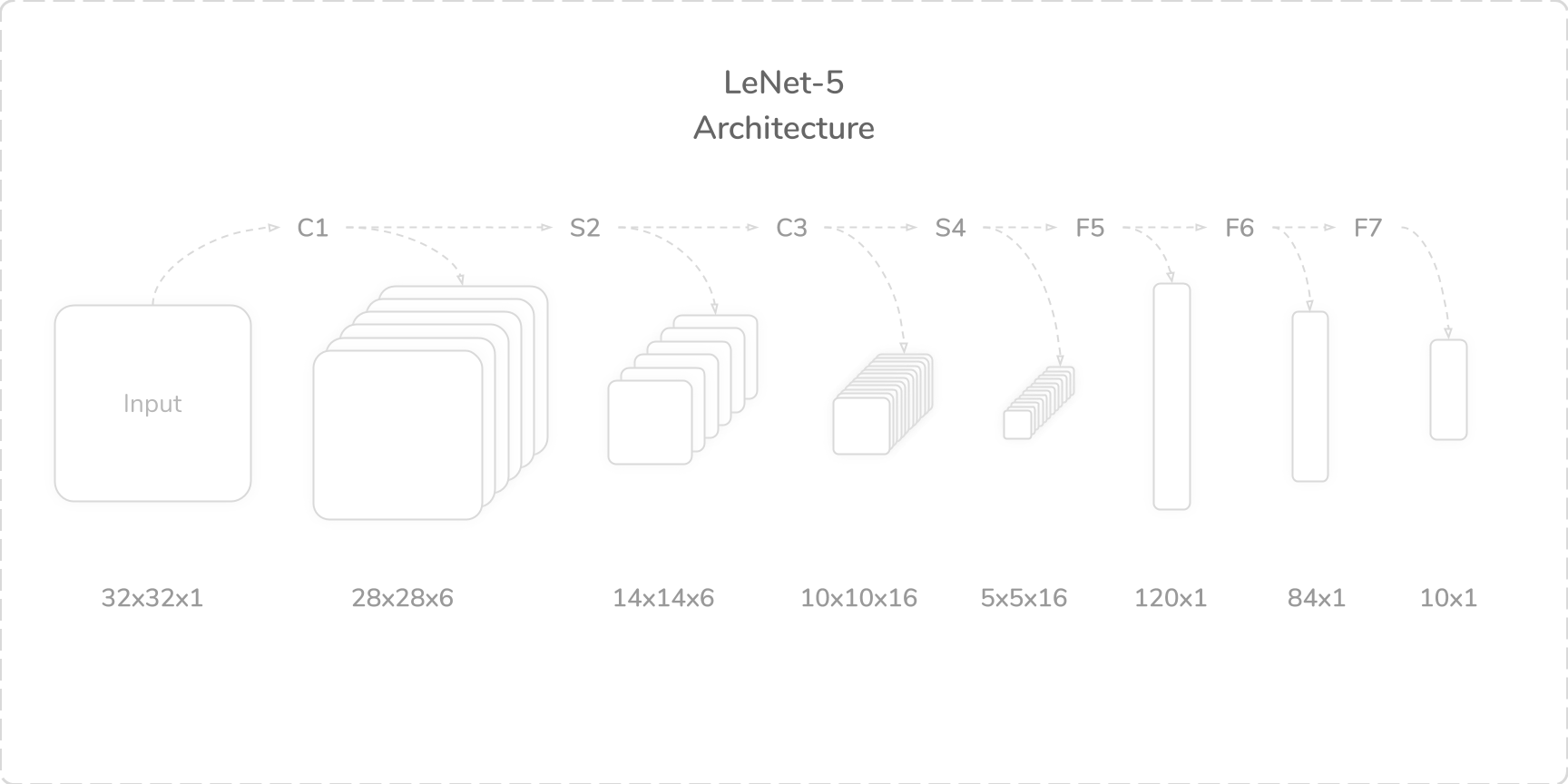
在 MNIST 数据集上,Yann LeCun 的 LeNet-5 具有 0.95% 的低误判率。其各层参数如下:
- C1:卷积层,num_kernels=6, kernel_size=5×5, padding=0, stride=1
- S2:均值池化层,kernel_size=2×2, padding=0, stride=2
- C3:卷积层,num_kernels=16, kernel_size=5×5, padding=0, stride=1
- S4:均值池化层,kernel_size=2×2, padding=0, stride=2
- F5:全连接层,out_features=140
- F6:全连接层,out_features=84
- F7:全连接层,out_features=10
S2 层有个需要注意的地方:它的每一个输出通道,是由对应的输入通道的池化结果,乘以 weight 再加上 bias。它们都是可训练的,于是 S2 层有了 12 个可训练参数(共 6 个通道,每个通道训练自己的 weight 和 bias)。S4 层与之类似,有 32 个可训练参数。
C3 的每个输出通道,只与 S2 指定的若干个通道相连。具体的分组方法如下:
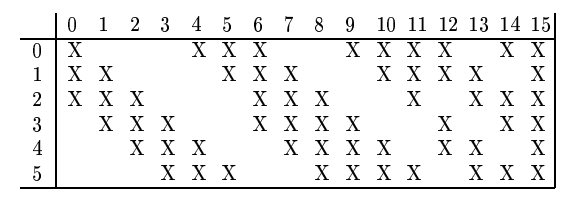
我们在代码里面继续偷懒,让 C3 的每个输出通道与 S2 所有通道相连。另外,由于 LeNet-5 输入为 32×32,而我们手上的 MNIST 是 28×28 的,于是做 2 像素的 padding,来形成 32×32 的图。
class LeNet5(nn.Module):
def __init__(self):
super().__init__()
self.conv1 = nn.Conv2d(1, 6, 5, padding=2)
self.pool1 = nn.AvgPool2d(2)
self.conv2 = nn.Conv2d(6, 16, 5)
self.pool2 = nn.AvgPool2d(2)
self.fc1 = nn.Linear(16 * 5 * 5, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self, x):
x = torch.tanh(self.conv1(x))
x = self.pool1(x)
x = torch.tanh(self.conv2(x))
x = self.pool2(x)
x = x.view(-1, 16 * 5 * 5)
x = self.fc1(x)
x = self.fc2(x)
x = self.fc3(x)
return x
net_5 = LeNet5()
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(net_5.parameters())
fit(net_5, epoch=20)
'''
epoch 0
[10000 / 60000] loss=0.8946414443850518
test acc: 0.8745999932289124
[20000 / 60000] loss=0.3811839409172535
test acc: 0.9031000137329102
[30000 / 60000] loss=0.34581568479537966
test acc: 0.9114999771118164
[40000 / 60000] loss=0.299122948423028
test acc: 0.9218000173568726
[50000 / 60000] loss=0.25059412196278574
test acc: 0.927299976348877
[60000 / 60000] loss=0.22540301881730557
test acc: 0.9373000264167786
...
epoch 19
[10000 / 60000] loss=0.024130959606263786
test acc: 0.9918000102043152
[20000 / 60000] loss=0.02669174194626976
test acc: 0.9901000261306763
[30000 / 60000] loss=0.02360637279227376
test acc: 0.9883000254631042
[40000 / 60000] loss=0.023022194614750333
test acc: 0.9933000206947327
[50000 / 60000] loss=0.035112172679509966
test acc: 0.9896000027656555
[60000 / 60000] loss=0.03023288542899536
test acc: 0.9898999929428101
'''注意到 LeNet-5 的泛化能力确实比 LeNet-1 好了一些,这边迭代 20 次之后,可以涨到 99.33% 的准确率。
来看 conv1 处理之后的结果:
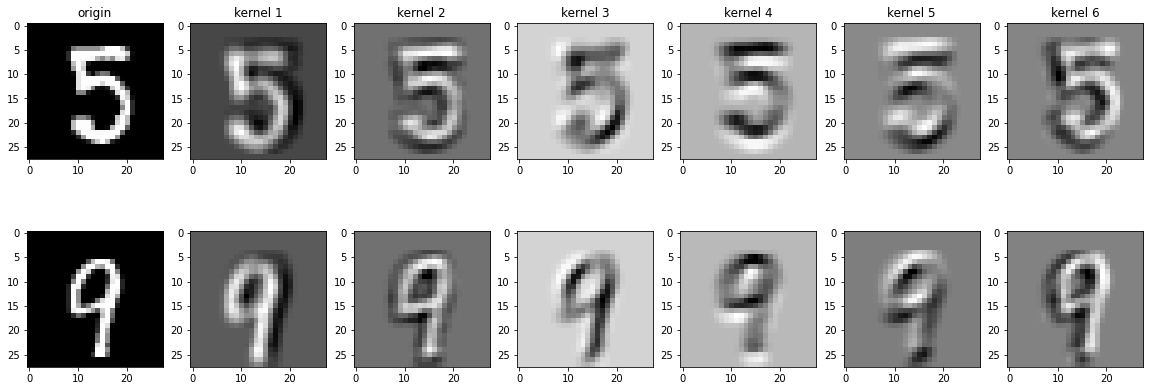
这里我们可以看出,kernel 3、5 可以提取上边缘,kernel 4 可以提取下边缘。kernel 1 可以提取竖线,kernel 2 可以提取横线。
Yann LeCun 训练这些 LeNet 的时候,对数据进行了预处理,使之均值为 0,方差大概为 1。另外,当时采用的是 MSE loss,本文采用了交叉熵。LeNet 是一个划时代的模型,但它也有一些不足之处:
- 网络很小,限制了应用场景。
- LeNet 采用了均值池化,但我们现在倾向于采用最大池化,这样可以加速收敛。
- LeNet 采用的激活函数是 tanh,但我们现在倾向于使用 ReLU。实践上,ReLU 往往能够有更好的正确率。
总结一句,LeNet 给我们提供的思路是:用卷积提取与位置相关的信息;用池化来减少特征数量;用全连接来提取特征、进行预测。